9月6日 3期生の3回目の講座は「改造の仕方」について
前回までにロボットを1から組み立てて、基本的なプログラミングを入れました。
今回からは思い思いのロボットに改造していきます。
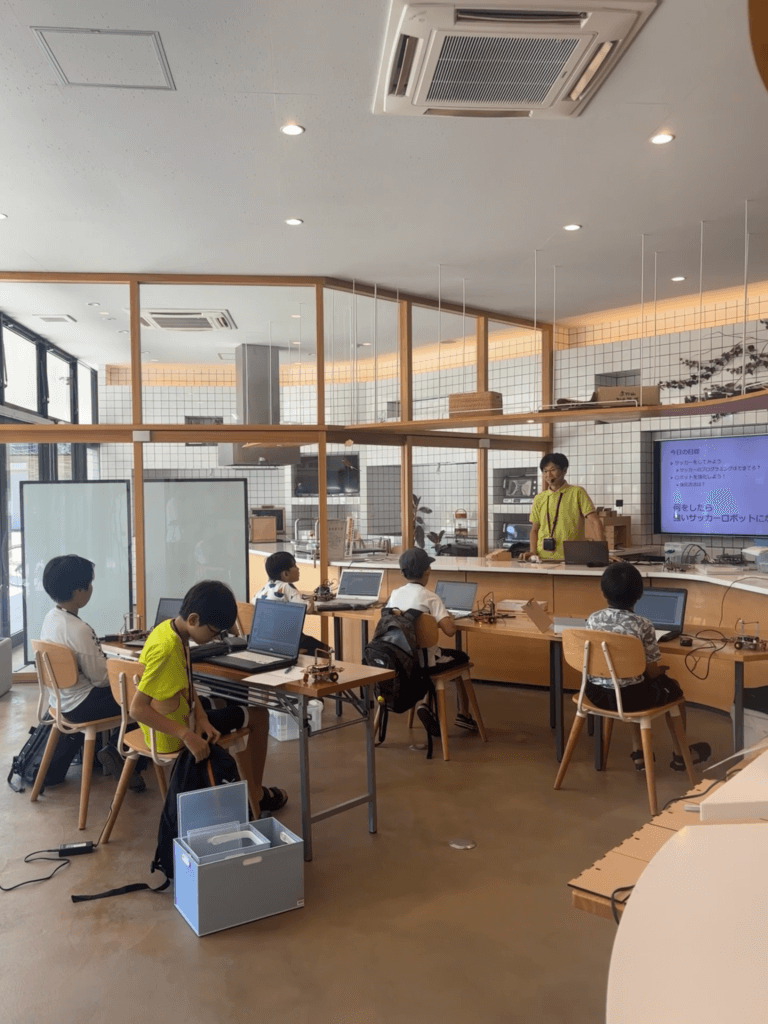
まずは計画を立てるところからスタート!
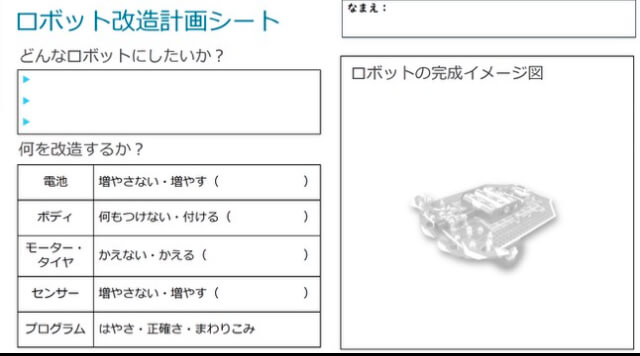
どんなロボットにしたいかイメージして、ゴールを決めるために必要なことを考えて、そのために必要なパーツを考えたり、どうすればパワーが出るのか考えたり、、やることは盛りだくさん!
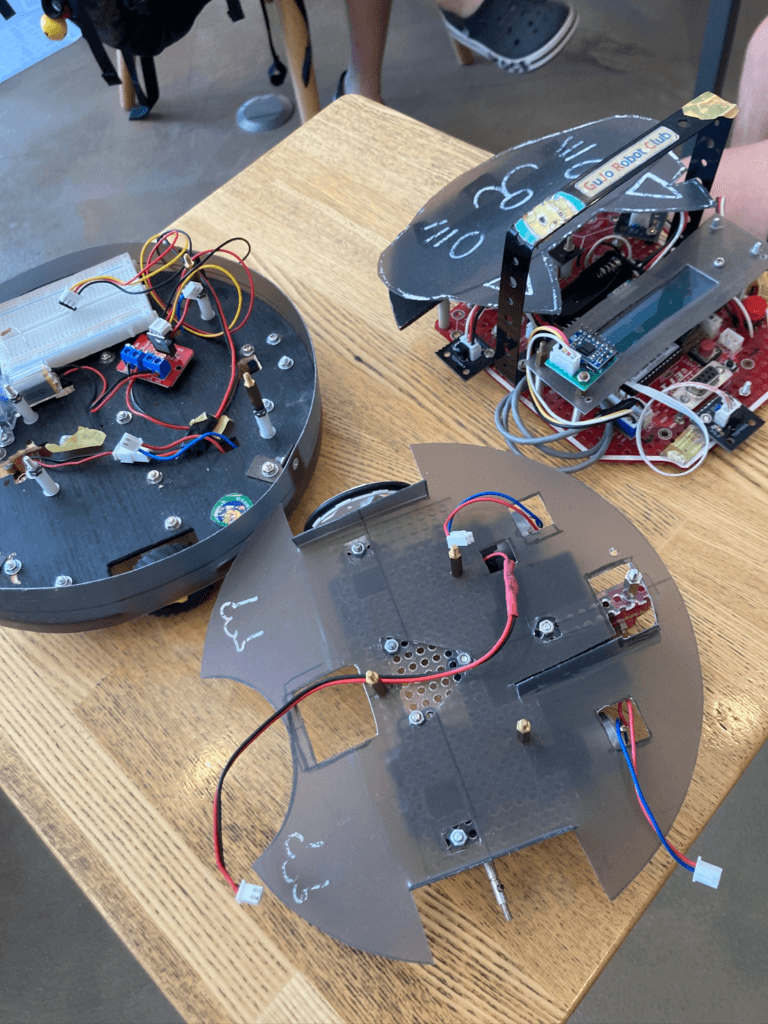
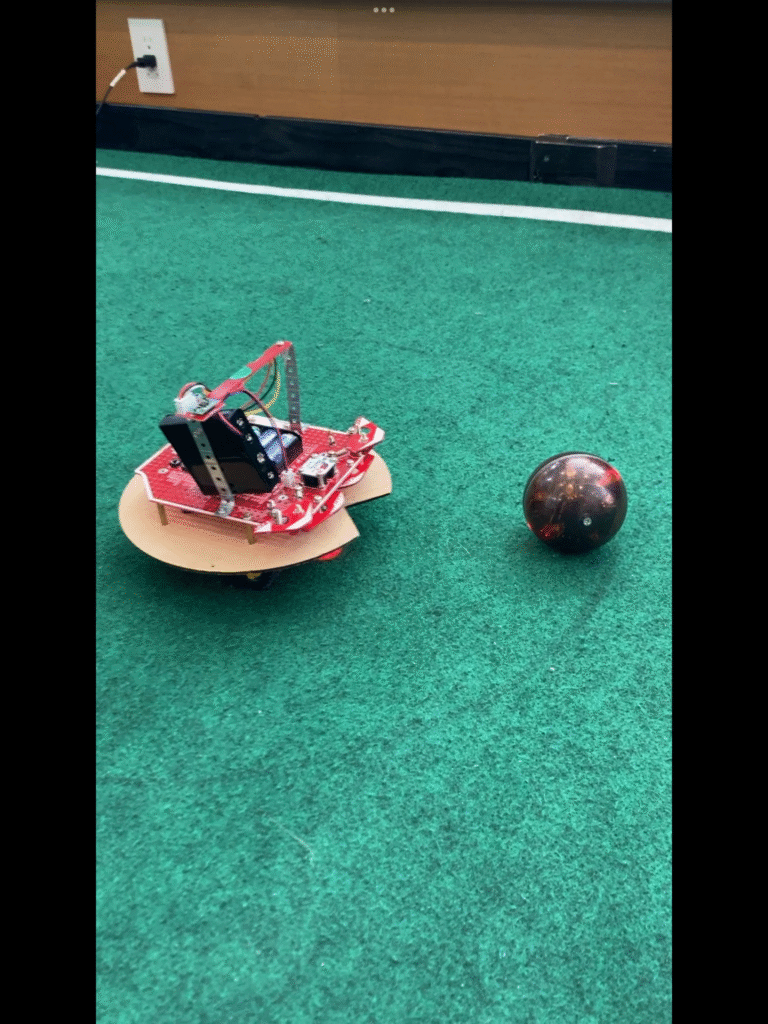
まずはみんなに共通で配ったコンパスのはゴールの方向を決めるための基本的なパーツ。
まずはロボットの目となり方向を決めるためのコンパスの調整からスタート!
コンパスが設定されたロボットは相手ゴール目掛けてボールを進むようになります。自分のゴールの方向にボールがある時は回り込むような動きをして守備する動きになります。
コネクタを差し込むところを勘違いしていたり、ゴールの方向の初期設定を間違えてしまったり、プログラミングが間違えていたり、、最初はなかなかうまくいかなくて、悔しい思いをすることも…。
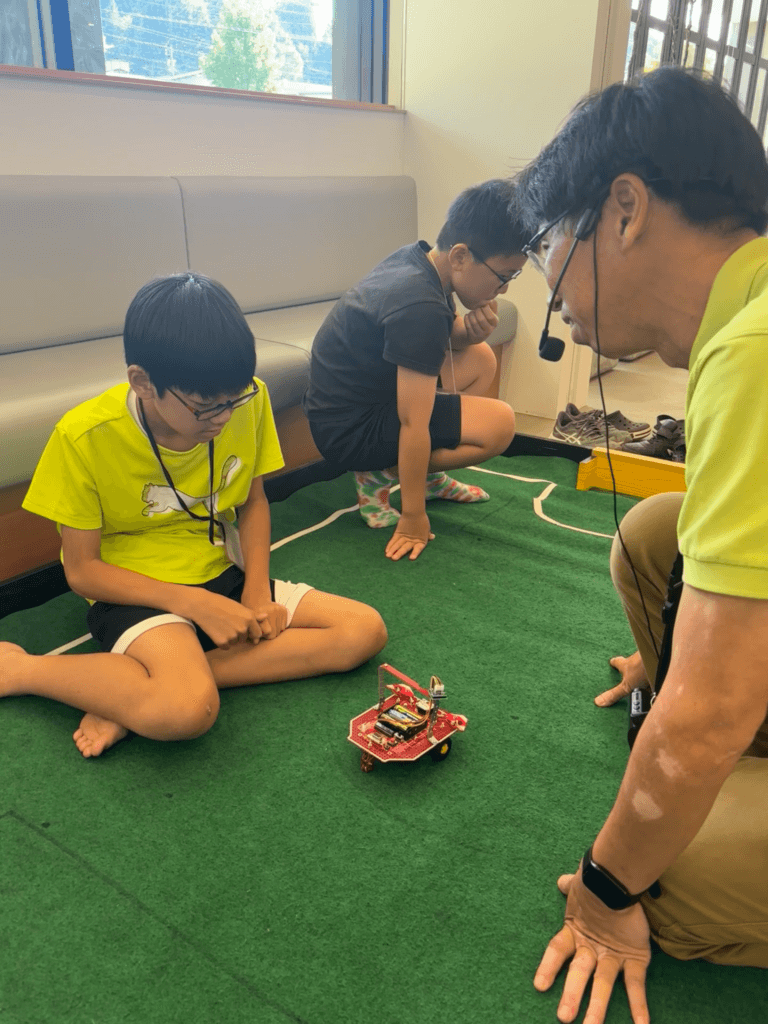
短時間の講座でもしっかり集中して何回も思い通りに動くように修正していきます。
失敗しては修正、、、トライ&エラーの繰り返しになりますが、思い通りに動いた時の喜びは格別です。
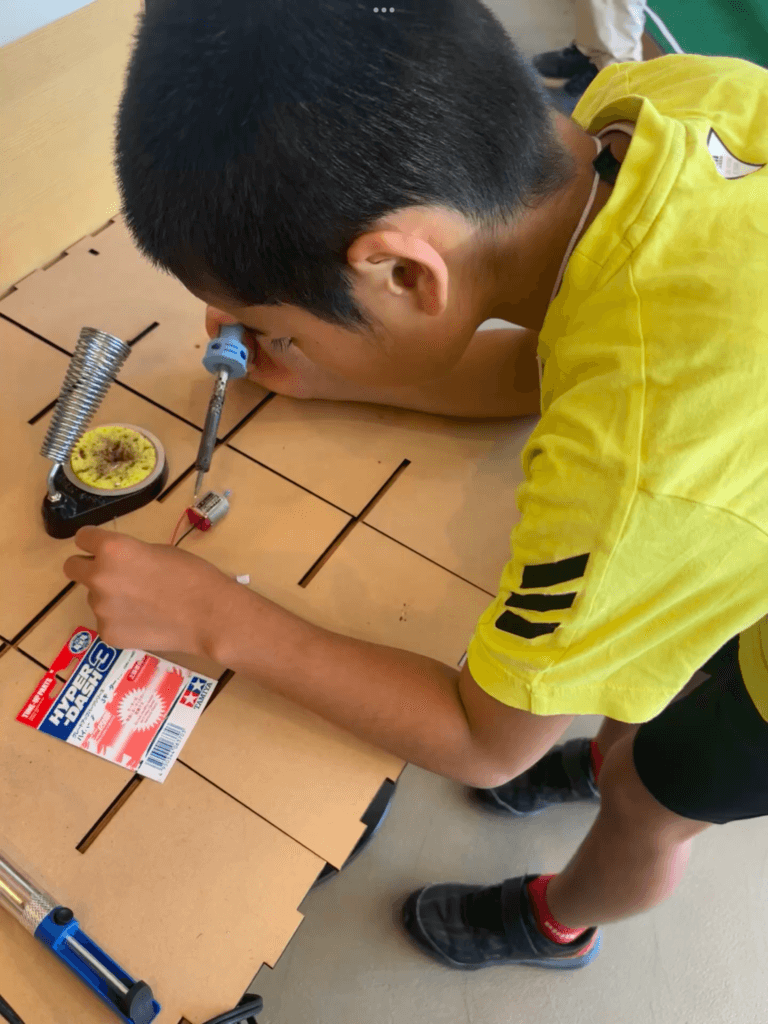
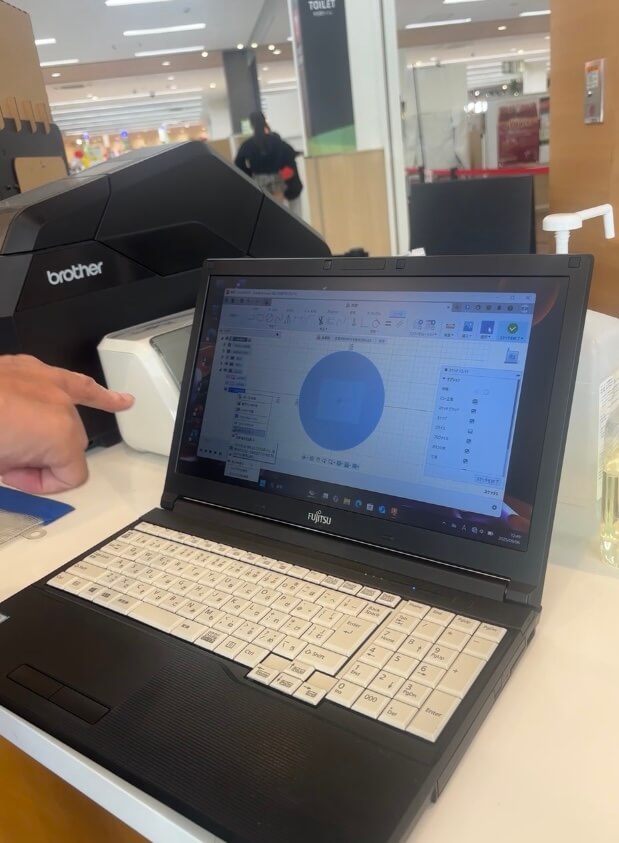
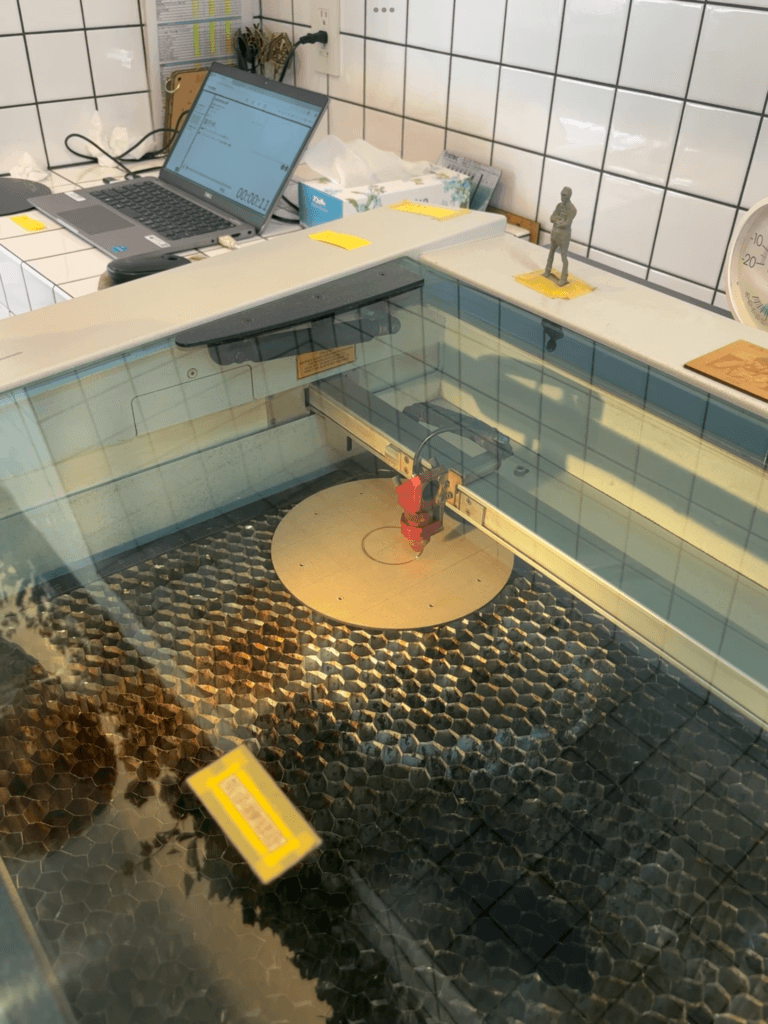
一方、先輩たちはタイヤを4つにして動きの幅を広げる改造やより強力なモーターの取り付け、CADソフトを使って基盤を載せるボディを描いてレーザーカッターで加工するなどそれぞれ個性的なロボット改造が進んでいる様子。

1期生~3期生まで一緒に活動していると、学年や学校の枠を越えて分かるところを教え合う関係が生まれつつあるようです。
あそぼろっとの魅力のひとつですね!


次回は新しいパーツをさらに加えていく改造を進めていく予定です。
パーツが増えると出来ることも増えて、ロボットの構造もプログラミングもますます複雑になっていきますが、ひとつひとつ動きを確認しながら改造を進めていきたいですね。
Instagramでも活動の様子を投稿しています。
ぜひ覗いてみてくださいね。